The Design Challenge
In order to explore and learn about other planets, humans need to be able to build autonomous robots that can gather real specimens and data. NASA and other large government and private space agencies are developing such robots with millions of dollars of funding. My goal is to build and program a prototype “mars rover” at ISK and test it out in remote and harsh environments in Kenya such as the Chalbi desert. The rover will act as a multipurpose desert capable driving base with many different possible applications. As an example, during a trip to the Turkana Basin Institute, a desert research facility, we learned it may be of interest to have a database containing surface level temperature and moisture readings over a large area of desert. This would be an ideal use case as a set of sensors could be installed on the bottom of the rover and with very little human interaction, it could drive a grid, taking data as it went.
Design Process & Research
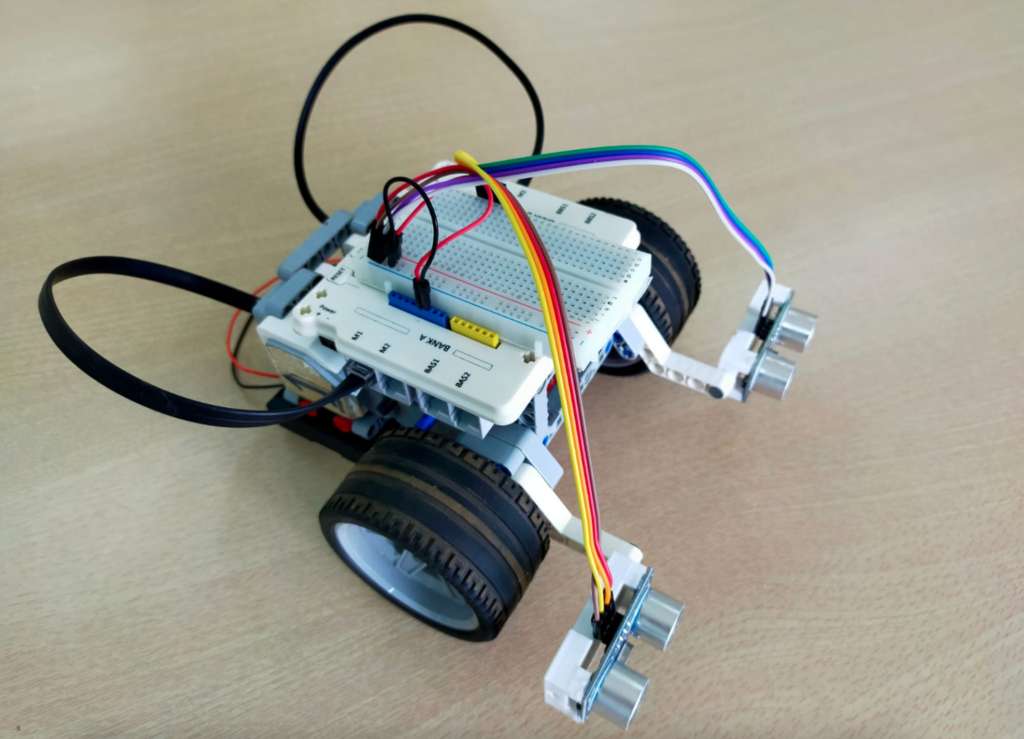
The design process for this project is still underway and being iterated upon. Research and initial planning along with the first two prototypes have been completed. A detailed description of the design process can be found in the journal; a brief summary is as follows. The first prototype was constructed to be a small-scale visual and semi-function mock-up that was constructed using a Lego® Mindstorms driving base and two ultrasonic sensors all controlled by an Arduino Uno microcontroller. The second prototype was to act as a proof of concept for controlling the final product with a RaspberryPi. It consisted of a basic metal frame with four brushed DC motors controlled by the Pi. This was extremely helpful in learning to work with and use the RaspberryPi system. Furthermore, this prototype was used to test and integrate other vital components such as a GPS, camera, sensor platform, etc. The next steps will be to begin work on the full-scale prototype by integrating larger motors with a full-scale driving frame, again controlled by a RaspberryPi.